
机器人研究所主要面向国内机器人装备制造业发展重点及技术需求,密切围绕国际学术前沿,结合世界机器人及其相关技术领域发展趋势,突破共性技术和关键技术,助推产业升级,促进成果转化和产业化。研究所主要研究方向如下:
1、并/混联机构学创新设计及其工程应用研究
2、柔索并联构型装备多柔体系统动力学及控制技术
3、康复/医疗机器人基础理论及应用关键技术研究
4、机器人自动化生产线系统集成及优化技术研究
- 电液混合驱动模块化可重构柔索并联机器人装备平台
电液混合驱动模块化可重构柔索并联机器人平台通过采用电液混合伺服驱动、模块化可移动伸缩式柔索支柱和组合式柔索并联机器人机构构型,能够实现大负载运转、高性能高精度运动输出,进行大范围工作空间的操作实验,同时可方便地开展各种不同组合构型一到六自由度变参数柔索并联机器人设计、运动演示、力学特性研究等,对学习者掌握并联机器人相关知识具有重要意义,同时研究者可通过该平台验证并联机器人机构学及液压驱动系统中的相关理论。本研究成果有望实现电液混合驱动模块化柔索并联机器人装备关键技术,在起重吊装/码垛搬运装备制造业上的应用,并积极促进成果转化和产业化。另外,该研究成果还可为多自由度协作可移动机器人装备机械设计、动态性能分析和多学科系统集成等关键技术研究提供借鉴。

- 混合驱动柔索并联机器人研究平台
混合驱动柔索并联机器人兼容混合驱动机构与柔索并联机器人高效率、大负载、高性能运动输出特点,通过建立混合驱动柔索并联机器人的动力学模型,结合实例进行了动态性能分析,研究了混合驱动柔索并联机器人工作空间、奇异位形分布以及误差灵敏度分析,探讨了该类控制系统的控制特点和适用的控制策略,设计了闭环PD型迭代学习控制策略,构建了混合驱动柔索并联机器人系统的集成优化模型,开展了系统分离优化设计和集成优化设计的性能比较研究。研究成果可应用于压力机、工程机械,联合作业工业机器人等制造业装备上,对装备系统的智能化设计、开发、综合性能提升奠定基础。
- 四轮全向移动机器人平台
四轮独立驱动和转向室外移动机器人底盘的四个车轮均采用轮毂电机驱动,并使用伺服电机经减速器减速,可以绕自身竖直中心轴独立转向。底层控制器为西门子PLC S7-1215,用于机器人运动控制;上层控制器为笔记本电脑,进行传感器数据处理、定位和路径规划等。笔记本电脑和PLC间使用以太网通信。通过使用三维激光雷达,进行室外环境探测和三维环境地图创建,用于精确定位和导航。

基于麦克纳姆轮的四轮独立驱动全向室内移动机器人,其底盘的四个车轮均为麦克纳姆轮,通过独立驱动实现全向移动功能,可在狭窄空间中灵活移动。通过使用激光测距传感器、Kinect摄像头、光电传感器,能够分别实现基于自由路径的定位和导航、基于固定路径的导航,以及避障等功能。通过无线网络通信,可与其它自动化装备进行系统集成。目前已用于智能制造示范生产线,在立体仓库和数控机床之间搬运物料。该移动机器人可用于机器人教学、定位和导航研究、智能物流等领域。

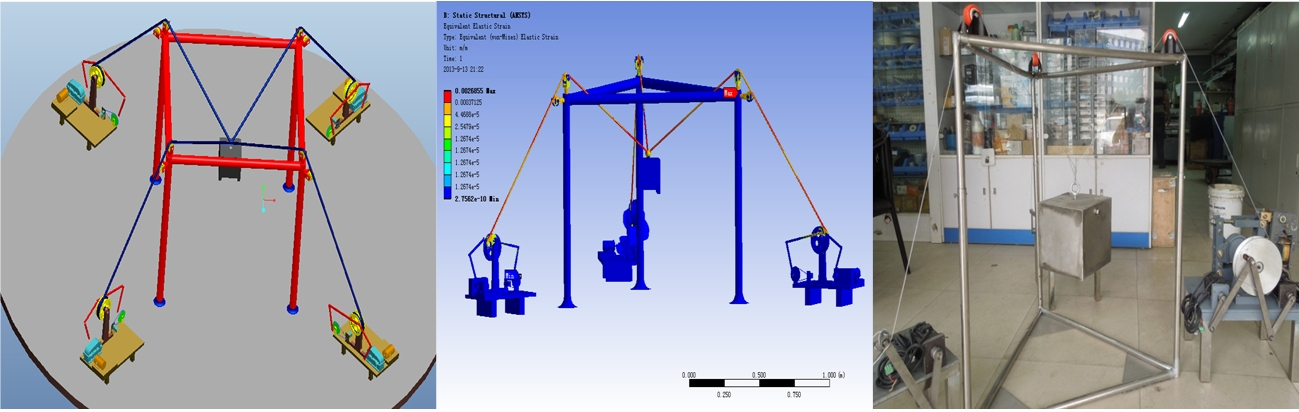
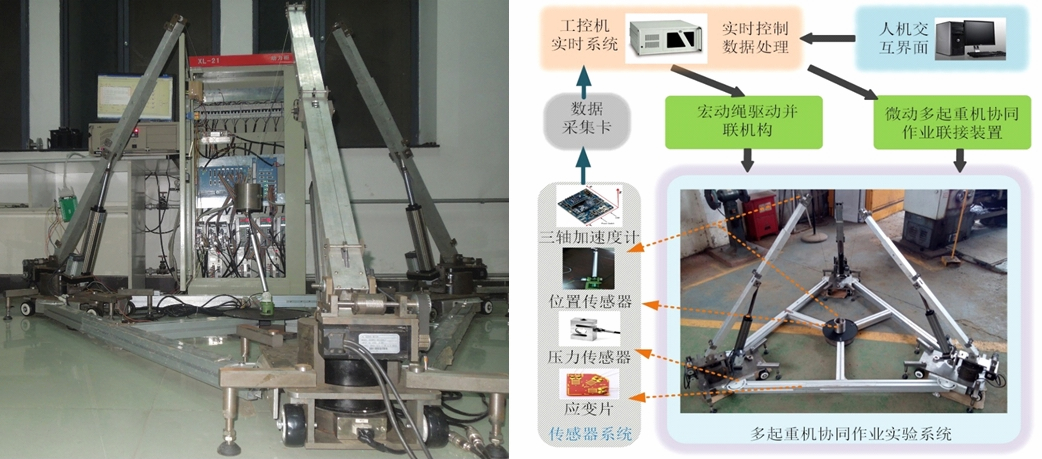
- 多起重机协作柔索并联吊装装备平台
多起重机协作柔索并联吊装装备平台由机械系统和控制检测系统两部分组成,三台结构和性能相同的起重机器人共同协作实现重物的吊装。控制检测系统实时采集机械系统的运行状态参数,并形成闭环反馈控制,实现对吊装重物空间运动轨迹的精确控制。该平台可完成多起重机协作柔索并联吊装装备的运动学标定、动力学参数辨识、误差与灵敏度分析、轨迹跟踪及协调控制等方面的实验,对学习者掌握柔索并联机器人理论、多机器人协作方法和机电一体化技术等知识具有重要意义。目前,多起重机协作柔索并联吊装装备在工程中得到了越来越广泛的应用,然而其安全性和稳定性亟待提高。在本平台的基础上,结合理论、仿真和实验,可为多起重机协作柔索并联吊装装备的稳定高效高质量作业提供技术支持,通过科技成果转化进一步拓展其应用范围。
- 人体康复训练机器人研究平台
通过对柔索并联机构以及气动人工肌肉的特殊性能分析,并基于人体各部位结构、运动特点,将柔索驱动与气动人工肌肉驱动相结合,设计模拟出模块化程度高,安全性高以及适应性强的人体腰部康复训练机器人。该平台主要开展人体康复训练机器人多学科优化创新设计,运动学,动态性能,跟踪控制训练策略等方面研究。研究成果可应用于人体康复训练。

- 面向工程应用的工业机器人平台
汽车主减速器自动化装配生产线通过使用多台工业机器人,实现上料、输送、在线压装、测量、全自动拧紧、转运、在线自动翻转、试验和调整等工序的有机集成,能完成减速器的高品质装配,并且显著降低劳动强度、提高生产效率;液压驱动并联机器人振动台采用液压作动器作为执行机构,可开展被测试样六个自由度的振动试验,其刚度大、运动行程长、承载能力强,广泛用于航天、驾驶、车辆振动试验等运动模拟领域;桁架机器人生产线作为一种成本低廉、结构简单的自动化机器人系统解决方案,在喷涂、码垛、分拣、包装、焊接、搬运、上下料、装配等工业生产领域广泛应用;飞行器机械手通过在四轴飞行器上安装有可控机械手,采用舵机控制其动作,能够完成紧急救援搜索、危险区域物品拾取等作业;五自由度组合式机器人平台通过在机械手的末端分别安装测距传感器和力传感器等,可实现零件三维轮廓扫描测量、基于力控制的轴孔装配,以及写毛笔字等功能。


